

MODULE ĐIỀU KHIỂN ĐỘNG CƠ TB6612 TB6612FNG - BẢO VỆ QUÁ DÒNG
- Kho hàng: Còn hàng
- Thương hiệu: Đang cập nhật
90.000₫
MODULE ĐIỀU KHIỂN ĐỘNG CƠ TB6612 TB6612FNG - BẢO VỆ QUÁ DÒNG

Introduction to TB6612FNG:
- The TB6612FNG is a DC motor drive device with a high current MOSFET-H bridge structure and a dual channel output that can drive two motors simultaneously.
- TB6612FNG output continuous driving current of 1 A per drunk, starting peak current up to 2A/3A (continuous pulse/single pulse); 4 kinds of motor control modes: forward/reverse/brake/stop; PWM support frequency up to 100 kHz; standby state; on-chip low-voltage detection circuit and thermal shutdown protection circuit; operating temperature: -20 ~ 85 ° C; SSOP24 small patch package.
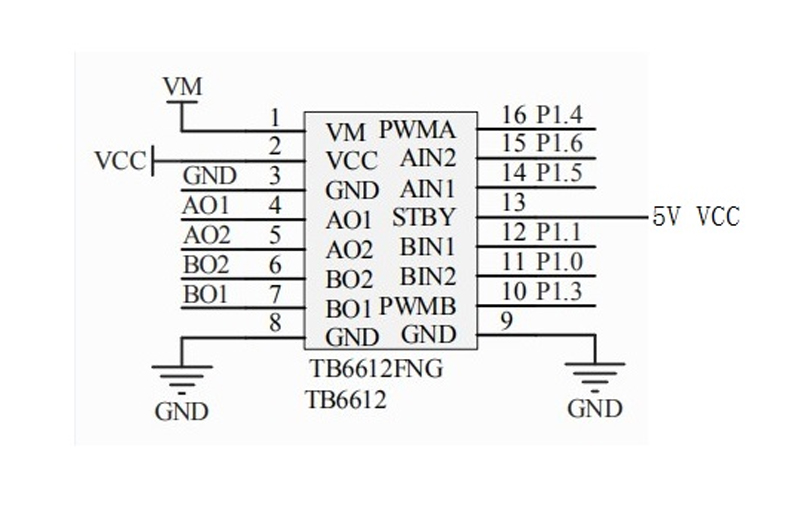
- Main pin functions of TB6612FNG: AINl/AIN2, BIN1/BIN2, PWMA/PWMB are control signal input terminals; AO1/A02, B01/B02 are 2-way motor control output terminals; STBY is normal working/standby state control pin; The VM (3 to 13.5 V) and VCC (2.7 to 5.5 V) are the motor drive voltage input and the logic level input, respectively.
- The internal MOSFET-based H-bridge integrated circuit of the IC is much more efficient than the transistor H-bridge driver. Compared to the L293D's average drive current of 600 mA per channel and 1.2 A pulse peak current, its output load capacity is doubled. Compared with the heat dissipation of the L298N and the peripheral diode freewheeling circuit, it does not require an external heat sink, and the peripheral circuit is simple. Only an external power supply filter capacitor can directly drive the motor, which is beneficial to reduce the system size.For PWM signals, frequencies up to 100 kHz are also very advantageous compared to the 5 kHz and 40 kHz of the above two chips.
TB6612 usage:
TB6612 is a dual drive, that is, it can drive two motors
The following are the IO ports that control the two motors.
The IO port clearing motor of STBY port is connected to the MCU. All the motors are stopped. Set 1 to control the forward and reverse by AIN1 AIN2, BIN1, BIN2.
VM is connected to power supply within 12V
VCC is connected to 5V power supply
GND will not say much.
Drive 1 way
PWMA is connected to the PWM port of the microcontroller
Truth table:
AIN1 0 0 1
AIN2 0 1 0
Stop the pass, reverse
A01
AO2 is connected to the two feet of motor 1
Drive 2
PWMB is connected to the PWM port of the microcontroller
Truth table:
BIN1 0 0 1
BIN2 0 1 0
Stop the pass, reverse
B01
BO2 is connected to the two legs of motor 2
Sản phẩm cùng loại

MODULE DÒ LINE NEWWAY BFD-1000
48.000₫
LCD1602 KEYPAD SHIELD
64.000₫
SALE
XE ROBOT 4 BÁNH ĐIỀU KHIỂN BẰNG BLUTOOTH - XE ĐIỀU KHIỂN
620.000₫
650.000₫
MODULE SẠC KHÔNG DÂY 5W 1A
85.000₫
